|
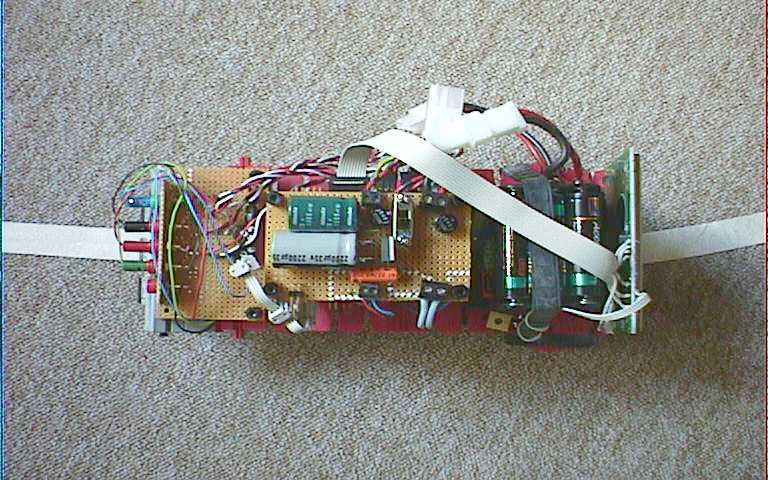
Prosti ist mein erster Robbi nach meinem neuen Konstruktionsprinzip.
Er ist aus den von mir entwickelten Elektronik-Modulen und einem
Chassis aus Fischertechnik zusammengebaut. Prosti folgt einer
Linie auf einem Kurs durch mein Arbeitszimmer. |
 |
Um dies zu bewerkstelligen ist Prosti mit drei LDRs ausgestattet,
die die Helligkeit des Bodens abtasten. Über eine Widerstandsbrücke
auf der separaten Platine vorne und einen PCF8591 A/D-Konverter
werden sie vom PCF8591 abgetastet. Über einen PCF 8574 auf der
Relais-Platine werden die beiden Fischertechnik-Motoren
gesteuert. |
 |
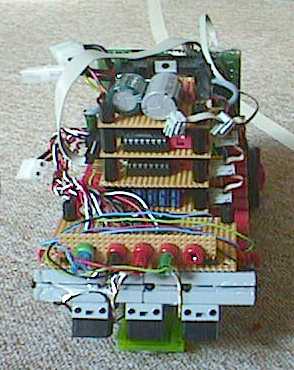
Die Stromversorgung ist für die Motoren und die Elektronik getrennt.
Die Motoren werden mit 8 NiMH-Mignon-Akkus versorgt und die Elektronik
über 6 andere NiMH-Mignon-Akkus. |
 |
Ein eigenes Problem stellte der Teppich in meinem Zimmer dar.
das vorne sitzende drehbare Rad drückte sich ein, verkanntete und
verhinderte das drehen des Robbis, auch Ketten blieben im Teppich
hängen. Schliesslich erwies sich ein Möbel-Teppichgleiter als
beste Alternative. |