Die Haupt-Steuerung des Roboters ist nach dem allgemeinen Systemkonzept aufgebaut.
Die Platine ist ausgelegt für einen Prozessor AT90S8515. Sie sollte aber auch für einen ATMega 161 verwendbar sein - doch das konnte ich nicht testen, da zur Zeit keiner zu bekommen ist. Der Prozessor ist mit einem6-poligen Stecker für In-System-Programmierung (ISP) verbunden.
Da ich Positionsdaten speichern will, habe ich die Schaltung mit 32 KB SRAM Winbond 24258-70LE ausgestattet, der über einen Latch 74HCT573N angesteuert wird. Er sollte mit eine 62256 kompatibel sein.
Zusätzlich gibt es noch eine serielle Schnittstelle, die mit einen MAX 232 versorgt wird.
Zur Kommunikation mit anderen Karten ist eine I2C-Schnittstelle vorhanden, über die auch die Stromversorgung erfolgt. SDA und SCL sind auf der Platine mit 3.3 KOhm-Wiederständen hochgezogen.
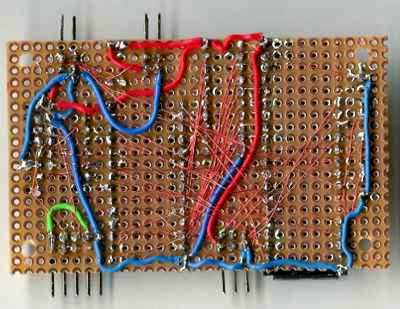
Die Platine wurde mit dem VeroWire-System verdrahtet.
Hier ist ein Schaltplan im GIF-Format.
Die Platine ist wie folgt bestückt:
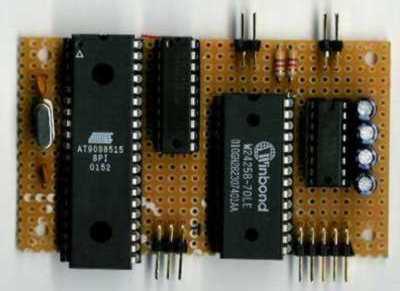
 Und nun noch zwei Fotos mit den Bauteilen und der Verdrahtung des Moduls:
Und nun noch zwei Fotos mit den Bauteilen und der Verdrahtung des Moduls:
© Mario Boller-Olfert 2002 - E-Mail:Kontaktformular - 123-Byte - Homepage