The main control of the robot is based on the general system concept.
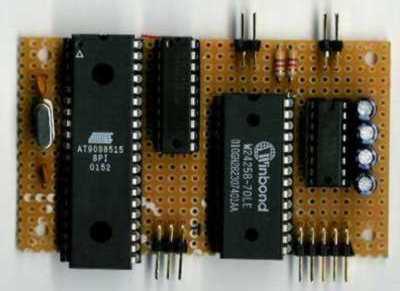
The board is designed for the microcontroller Atmel AT90S8515. It should also be suitable for an ATMega 161 - but I was not able to test that up to now. The processor is connected to a 6 pole male connector for in system programming as it exists on the Atmel STK500 development board I use.
I want to store positioning data on the card. So I equipped the circuit with a 32 KB SRAM Winbond 24258-70LE, which should be pin compatible to a 62256 SRAM. It is controlled using a latch 74HCT573N which s necessary to multiplex the processor lines to the address and data bus of the SRAM.
In addition there is a serial port that is supported by a MAX 232 voltage level converter.
An I2C interface exists to communicate with other cards. The power for the card is also supplied over the I2C interface. SDA and SCA are pulled up by use of two 3.3 KOhm resistors.
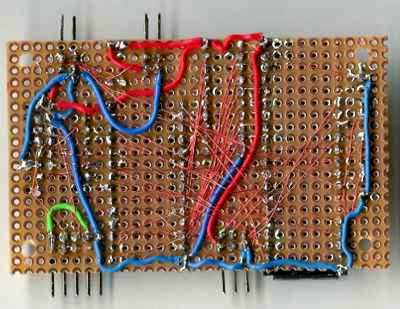
The board isr wired using the VeroWire-system.
Here you will get a circuit diagram in GIF-format.
The board is mounted like this:
And here are two photographs with the components and the wiring of the module:
© Mario Boller-Olfert 2002 - E-Mail:Kontaktformular - 123-Byte - Homepage